安装并准备 ROS Noetic + Gazebo / 创建 ROS 工作空间¶
🧱 1. 安装并准备 ROS Noetic + Gazebo / 创建 ROS 工作空间¶
- 安装 ROS Noetic 如果还没装,请使用鱼香ROS的一键安装脚本安装 ROS Noetic。
按照推荐选择即可,可以参考如下选择:
安装 Gazebo(Noetic 默认 Gazebo 11):
sudo apt install ros-noetic-gazebo-*
sudo apt install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
- 建立工作空间
- clone 仓库
git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
-
编译 启动一个新的终端。
-
环境变量
把工作空间的环境自动加载(加入 .bashrc):
指定 TurtleBot3 机器人模型(可以是 burger / waffle / waffle_pi):
🚀 2. 启动 Gazebo 仿真¶
✅ 启动空环境¶
打开一个终端:
这会启动 Gazebo 并载入一个空世界和 TurtleBot3 机器人模型。
🌍 启动带障碍物 / 环境的世界¶
比如你想在默认世界里:
或者一个房子环境:
注意,首次载入 house 世界可能需要稍长时间下载模型
🎮 3. 控制机器人移动¶
要在 Gazebo 里控制机器人:
🕹️ 键盘控制¶
打开新终端(保持 Gazebo 正在运行),然后:
这会启用键盘控制(W/A/S/D 前进 / 后退 / 旋转),空格键停止等。
🧠 4. 使用 ROS 节点控制机器人¶
如果你想自己写 ROS 节点发布速度指令:
📡 ROS 话题控制例子¶
在另一个终端:
rostopic pub /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.5}}'
这会让机器人向前移动并缓慢旋转(只是例子,可以根据自己的代码改写)。
你也可以写一个节点发布 geometry_msgs/Twist 到 /cmd_vel。
🧩 5. 可选:启动自动避障 / SLAM / 导航¶
官方示例也有预设的一些 launch 文件:
这个会启动模拟环境和避障、导航等节点(看你安装了哪些包)。
🛠️ 常见问题 & 注意事项¶
✔ 找不到 launch 文件
确保工作空间正确编译、source 已加载,否则 Gazebo launch 会报找不到包的错误。
✔ ROS 环境没有加载
每个新的终端必须 source ~/catkin_ws/devel/setup.bash 才能使用 turtlebot3 的命令。
✔ Gazebo 显示空白
可能是 Gazebo 与 ROS 库版本不匹配,确认 ROS Noetic 与 Gazebo 11 对应安装。 (一般通过 apt 安装可以保证兼容性)
如果你想,我也可以给你写出 一个完整 ROS Python 示例程序,让 TurtleBot3 在 Gazebo 中自动执行简单动作(如避障或走直线)。要不要?
额外补充内容¶
1. ~/.bashrc 和 source ~/.bashrc¶
- ~/.bashrc 文件
- ~/.bashrc 是一个隐藏的配置文件,位于 Linux 系统用户的主目录下(
~表示当前用户的主目录)。它是 Bash shell(默认的命令行解释器)的配置文件之一,通常用于存储用户的环境变量、别名、shell 配置等。 - 比如,你可以在其中设置常用的命令别名,或是更改命令提示符的样式,甚至设置路径来让系统识别新的程序和脚本。
-
常见内容:
这里export PATH是将一个新的路径添加到系统的环境变量中,alias是创建一个简化的命令。 -
source ~/.bashrc - 当你修改了
~/.bashrc文件后,修改并不会立即生效。如果你想要让新的配置立即生效,可以在命令行中执行: source命令会读取并执行指定文件的内容,这样你就不需要重新启动终端窗口,便可以在当前会话中应用文件中的新设置。
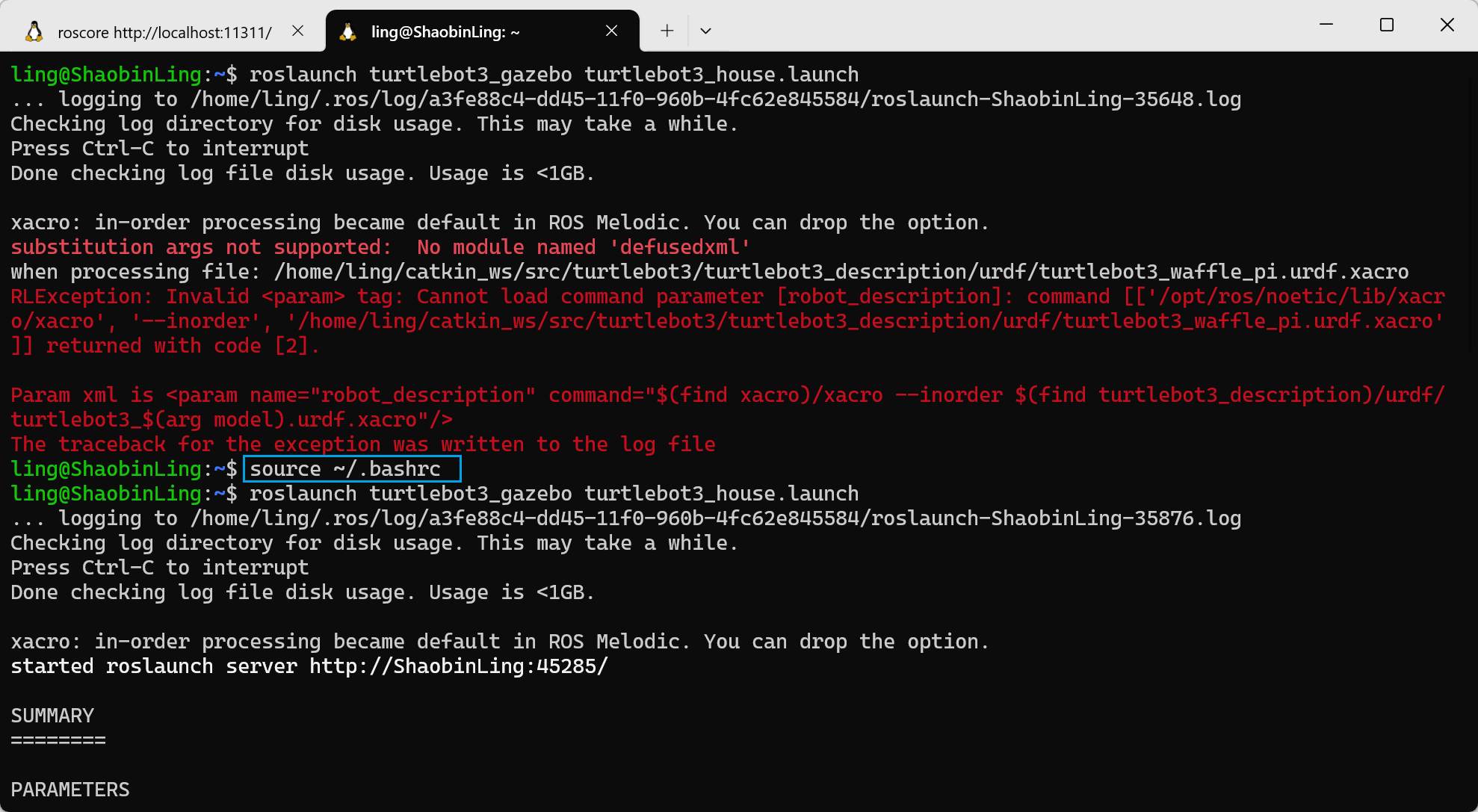
在windows系统的ubuntu终端(terminal)中,它并不source ~/.bashrc。所以用它来执行一些脚本可能会显示有一些错误,例如: substitution args not supported: No module named 'defusedxml'。
所以在使用这个终端执行ros相应指令的时候,你需要先source ~/.bashrc。 操作如图:
2. ROS 文件结构 (/opt/ros/)¶
- ROS(Robot Operating System) 是一个开源机器人操作系统,用于开发机器人应用。在 Linux 系统中,ROS 的文件结构通常位于
/opt/ros/目录下。
/opt/ros/ 目录下的内容结构如下:
- /opt/ros/noetic/(或其他版本,如 melodic、foxy)
- bin/:存放 ROS 命令行工具,比如 roscore、roslaunch。
- include/:包含 ROS 库的头文件。
- lib/:存放 ROS 的库文件。
- share/:ROS 包和资源文件的目录,通常存放各个 ROS 包(例如,roscpp、rospy)和一些工具配置文件。
在 /opt/ros/ 下,通常会包含特定版本的 ROS 相关文件夹,例如 noetic,这是 ROS 1 的一个版本。在这个目录下,你可以找到 ROS 的核心工具、包和库。
3. ROS 包的命名规律与安装方法¶
- ROS 包命名规律
-
ROS 包的命名通常遵循以下规则:
- 小写字母和下划线:例如,
my_robot_package。 - 功能明确:包的名称通常与包的功能直接相关,例如
ros_control、ros_comm等。 - 版本号:有些包的名称可能包含版本信息,尤其是跨版本开发时,可能会看到类似
my_package_v2的命名方式。
- 小写字母和下划线:例如,
-
如何使用
apt安装 ROS 包 - 在 Ubuntu 系统中,ROS 包可以通过
apt包管理器直接安装。一般来说,ROS 的软件包已经预先编译并存放在 ROS 的官方软件源中,用户可以直接安装。 -
安装命令格式:
其中,<rosdistro>是 ROS 版本(如noetic、melodic等),<package_name>是你要安装的 ROS 包名称。- 示例:安装 ROS 1 Noetic 的
ros-base包:
- 示例:安装 ROS 1 Noetic 的
-
安装完成后,ROS 包会自动放置在
/opt/ros/<rosdistro>/目录下,并且你可以使用 ROS 提供的命令来操作这些包。
4. 多主机连接(ROS 多机通信基础)¶
在 ROS 中,可以让 多台电脑同时运行一个 ROS 系统,比如:
- 一台电脑(主机)运行 roscore
- 另一台电脑(从机)连接进来,发布或订阅话题
这在 机器人本体 + 上位机、多机器人协作 中非常常见。
4.1 多主机通信的基本原理¶
ROS 多机通信的核心思想是:
所有节点都必须能通过“主机名或 IP 地址”互相找到对方
所以需要解决两个问题: 1. 主机之间能不能互相“叫出名字” 2. ROS 知不知道谁是 Master、自己是谁
4.2 获取本机信息(主机名 & IP 地址)¶
① 查看本机主机名(hostname)¶
在终端输入:
输出的就是 当前机器的名字,ROS 中会用到。
如果你想查看更完整的信息:
假设经过查询,主机的名字是:robot-master,而从机的名称是:robot-slave。
② 查看本机 IP 地址¶
或更简单:输出示例:
假设,主机的IP是:192.168.1.100,从机的IP是:192.168.1.101
👉 记下 IP 地址 + 主机名,稍后会用到。
4.3 修改 /etc/hosts¶
① /etc/hosts 是干什么的?¶
/etc/hosts是一个 本地的“名字 → IP 地址”对照表- 修改它可以让电脑在 不依赖 DNS 的情况下,直接通过主机名找到另一台电脑
② 编辑 /etc/hosts¶
假设:
- 主机(Master)
- hostname:robot-master
- IP:192.168.1.100
- 从机(Slave)
- hostname:robot-slave
- IP:192.168.1.101
那么 两台机器的 /etc/hosts 都要加上:
📌 重点提醒: - 两台电脑都要改 - 内容要完全一致 - IP 一定要写对(校园网下重启电脑/机器人可能会改变其IP)
4.4 在 ~/.bashrc 中配置 ROS 环境变量¶
ROS 通过几个 环境变量 来决定: - 谁是 Master - 自己是谁 - 通过什么方式被别人访问
① 打开 ~/.bashrc¶
② 设置 ROS Master(所有从机都要设置)¶
假设 Master 运行在 robot-master 上,端口默认是 11311:
③ 设置本机身份(每台机器不同)¶
方法一:使用主机名¶
在主机上:
在从机上:
方法二:使用 IP(网络不稳定时更保险)¶
⚠️ ROS_HOSTNAME 和 ROS_IP 二选一,不要同时设置
④ 让修改立即生效¶
4.5 启动顺序¶
1️⃣ 在主机(Master)上:
2️⃣ 在从机上测试连接:
如果能看到话题列表,说明多机通信成功 🎉
4.6 常见错误¶
| 问题 | 原因 |
|---|---|
ERROR: Unable to communicate with master |
ROS_MASTER_URI 写错 |
| 能 ping 通但 ROS 不通 | /etc/hosts 未配置 |
| 一台能用一台不行 | ROS_IP / ROS_HOSTNAME 设置错误 |
| 换网络就坏 | IP 地址变了 |
4.7 总结¶
ROS 多机通信本质上就是:
让多台电脑在同一个网络下,用“能互相找到的名字和地址”共享一个 roscore